Que sont les robots mobiles autonomes ?
Les entrepôts, les compagnies de logistique, les entreprises agricoles et les établissement de santé cherchent tous des moyens nouveaux et innovants pour améliorer l'efficacité opérationnelle, la rapidité, la précision et la sécurité. Beaucoup se tournent vers les robots mobiles autonomes (AMR).
Un robot mobile autonome est un type de robot qui peut comprendre et se déplacer dans son environnement de manière indépendante. Les AMR diffèrent de leurs prédécesseurs, les véhicules à guidage autonome (AGV), qui s'appuient sur des pistes ou des chemins prédéfinis et nécessitent souvent la surveillance d'un opérateur.
Les AMR utilisent un ensemble sophistiqué de capteurs, d'intelligence artificielle, de machine learning et de calcul pour planifier la trajectoire, afin d'interpréter et de naviguer dans leur environnement sans être alimentés par un câble. Les AMR étant équipés de caméras et de capteurs, ils utiliseront une technique de navigation telle que l'évitement de collisions pour ralentir, s'arrêter ou réorienter leur trajectoire s'ils rencontrent un obstacle inattendu en naviguant dans leur environnement (par exemple une boîte tombée ou une foule de personnes).
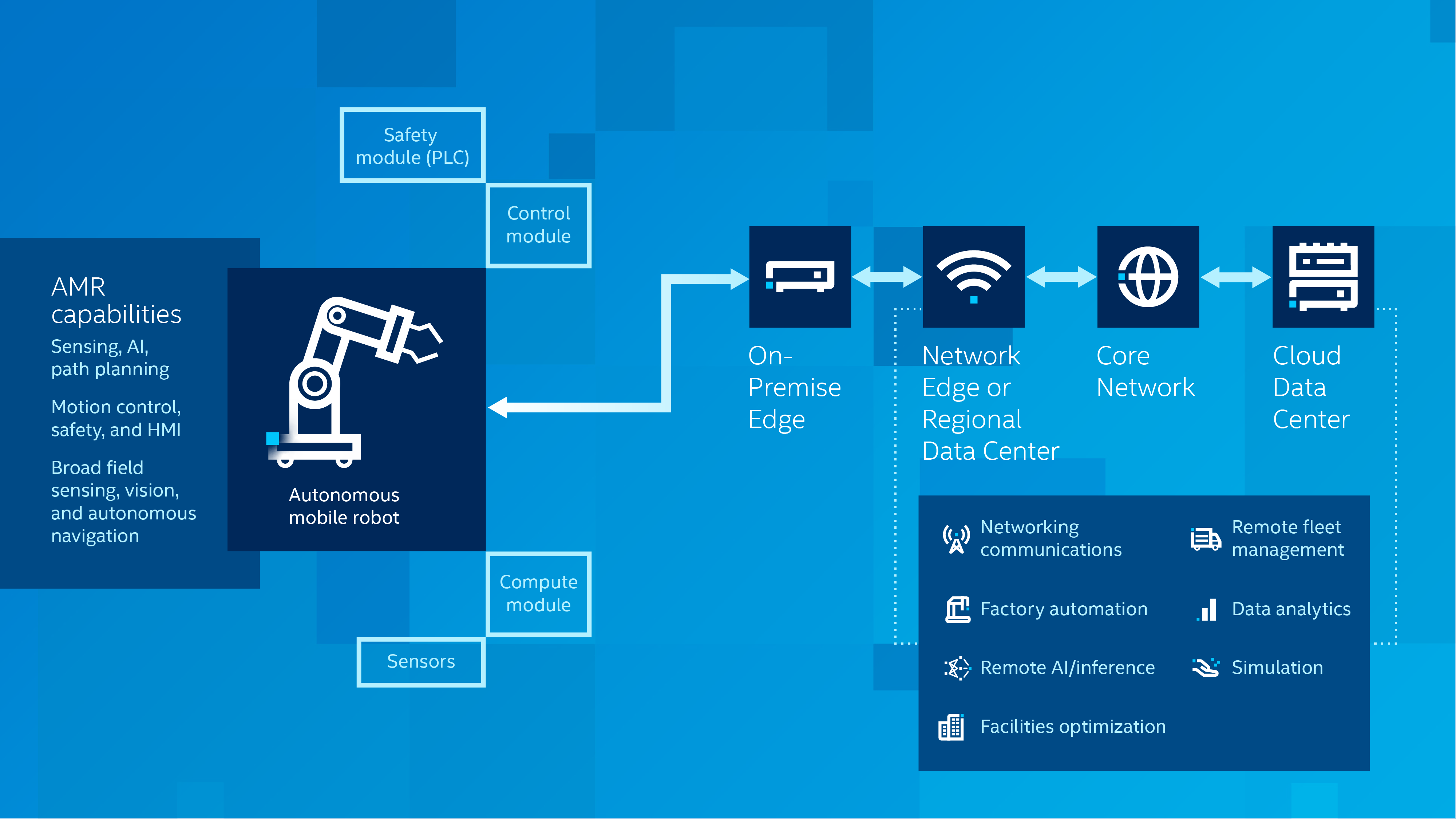
Composants et architecture d'un robot mobile autonome
Regardez le schéma ci-dessous afin de découvrir comment les composants système se combinent pour activer les AMR.
{kind=link}
Pourquoi adopter les robots mobiles autonomes ?
Sécurité des travailleurs renforcée
De nombreuses entreprises utilisent les AMR pour des tâches qui seraient dangereuses ou impossibles pour des travailleurs humains. Ils peuvent par exemple être utilisés pour nettoyer et désinfecter des zones afin de les rendre plus saines et plus sûres, pour transporter des spécimens de laboratoire contagieux dans les hôpitaux, pour porter des charges lourdes dans des environnements industriels ou pour travailler dans des conditions extrêmes dans lesquelles les humains ne peuvent et ne doivent pas travailler.
Flexibilité accrue
Les AMR évaluent et réagissent dynamiquement à leur environnement tout en effectuant une série de tâches, et ce sans la supervision directe d'un opérateur. Les solutions de localisation et de cartographie simultanées (SLAM) ainsi que la technologie de cartographie avancée permettent aux AMR de comprendre et de s'adapter aux changements de leur environnement. Cette flexibilité en fait un outil précieux qui peut être utilisé dans de nombreuses applications et industries.
Efficacité et productivité améliorée
Les entreprises utilisent souvent des AMR pour aider les employés à se concentrer sur des activités à forte valeur, notamment l'assistance clients, afin de les aider à localiser, prélever et déplacer les stocks. Lorsque la productivité est essentielle, de nombreuses entreprises se tournent vers des AMR à faible puissance qui nécessitent moins d'énergie pour fonctionner. Moins de puissance pour fonctionner signifie que les AMR peuvent se recharger et se remettre au travail plus rapidement, ce qui réduit le temps d'arrêt et permet de maintenir la production et les opérations.
AMR en action
Découvrez les façons révolutionnaires dont les entreprises innovantes intègrent les AMR dans leurs activités et les avantages qu'elles en retirent.
Améliorer l'efficacité opérationnelle grâce au développement et au déploiement accélérés des AMR
Découvrez comment le kit Up Squared RoboMaker Pro d'AAEon accélère et simplifie le développement et le déploiement des AMR grâce à tous les composants matériels et logiciels intégrés et prévalidés dont vous avez besoin, notamment les caméras Intel® RealSense™ pour la vision 3D et même les moteurs et les roues, le tout dans une seule et même boîte.
Assister les hôpitaux avec une désinfection plus rapide et plus efficace
Découvrez comment la start-up irlandaise Akara utilise les technologies Intel® pour alimenter des robots mobiles autonomes intelligents et tueurs de germes.
Améliorer l'expérience client avec les solutions de livraison mobile
Découvrez comment la technologie de détection de la profondeur Intel® RealSense™ guide les robots Aethon pour leur permettre de livrer des articles de manière autonome et rendre l'expérience des clients plus mémorable, qu'il s'agisse du service en chambre, des approvisionnement de nourriture et de banquets, ou du linge.
Applications industrielles pour les AMR
Fabrication, entreposage et logistique
Les robots mobiles autonomes prennent rapidement de l'importance pour les entreprises de fabrication, d'entreposage et de logistique en raison de leur polyvalence et de leur facilité d'intégration dans les infrastructures existantes. Ils peuvent servir à effectuer des tâches lourdes et légères, livrer des articles aux employés et réaliser des contrôles de sécurité et de sûreté.
Santé
Les prestataires de soins de santé comptent sur les AMR pour répondre à des besoins critiques, notamment la désinfection, la téléprésence, la livraison de médicaments et de fournitures médicales. Cela crée des environnements sûrs pour tous et libère le personnel afin qu'il puisse passer plus de temps avec les patients.
Vente au détail, banque et hôtellerie
Les entreprises du secteur de la distribution et de l'hôtellerie utilisent les AMR pour rationaliser et améliorer l'expérience client, du service client à l'automatisation des inventaires, en passant par le service en chambre, l'assistance aux bagages et l'orientation.
Villes intelligentes et secteur public
Les villes et agences gouvernementales innovantes du monde entier tirent parti de tout ce que les AMR ont à offrir. Les villes intelligentes les utilisent pour améliorer les services d'hébergement, notamment l'enlèvement des ordures ou les transports publics, et les agences publiques utilisent les AMR pour la sûreté et la sécurité, les missions de recherche et de sauvetage, et l'exploration spatiale.
Agriculture
Pour faire face à la croissance démographique attendue d'ici 2050, le monde va devoir augmenter sa production de nourriture de 50 % par rapport à aujourd'hui.w.1 Pour y parvenir, les entreprises agricoles surmontent les importantes pénuries de main-d'œuvre, stimulent la productivité et améliorent les rendements avec l'aide des AMR.
Prendre en charge les AMR à la périphérie
Intel propose des technologies et des solutions de calcul, de connectivité, de temps réel, de gestion, de sécurité, d'IA et de stockage prêtes pour la périphérie. Vous pourrez ainsi mettre en place vos AMR et les faire fonctionner en toute tranquillité, à l'usine, aux champs et partout où vous choisirez de les déployer.
Edge Insights pour AMR
Découvrez comment vous pouvez facilement développer, construire et déployer des applications de robots mobiles de bout en bout grâce à notre développement de logiciels spécifiques, ouverts et modulaires.
Produits Intel® RealSense™
Découvrez la gamme robuste de caméras de profondeur qui permettent aux AMR de percevoir et de s'adapter à leur environnement grâce à des fonctionnalités comme l'évitement des collisions et la cartographie de l'occupation.
Concentrateur de logiciels Intel® Edge
Accédez à des progiciels gratuits, personnalisables et prêts à être déployés, à des mises en œuvre de référence et à une gamme de ressources et d'outils conçus pour vous aider à accélérer le développement et le déploiement de solutions informatiques de périphérie.
Intel® DevCloud pour l’Edge
Testez le matériel Intel® avant de l'acheter. Ce bac à sable en ligne comprend la dernière version de la distribution Intel® du kit d'outils OpenVINO™, de Deep Learning Workbench et nos derniers processeurs, processeurs graphiques, VPU et FPGA.
Distribution Intel® du kit d'outils OpenVINO™
Accédez à des outils essentiels et des composants pré-construits pour rationaliser le développement des capacités d'inférence de l'IA pour les AMR.
Vous construisez des solutions robotiques ?
Consultez notre catalogue d'offres pour les partenaires dans le but de créer des solutions de bout en bout. Robot, périphérie, cloud... Nous disposons d'offres incluant des kits de développement robotique, des logiciels et des composants matériels.
Questions-Réponses
Un robot mobile autonome (AMR) est un type de robot qui peut comprendre et se déplacer dans son environnement sans être surveillé directement par un opérateur ou limité à un parcours fixe et prédéterminé. Tous les AMR commencent par une plateforme mobile, et beaucoup sont dotés de pièces ou de manipulateurs passifs ou actifs permettant d'accomplir un éventail de tâches. Les AMR sur roues, sans câbles d'alimentation ou de données, naviguent à l'aide de caméras, de capteurs, d'intelligence artificielle et de vision par ordinateur.
Un exemple de robot mobile autonome est l'AMR « pick-and-place » couramment utilisé dans les entrepôts. Cet AMR utilise la technologie de vision par ordinateur pour identifier, saisir et déplacer des objets d'un endroit à un autre tout en évitant les obstacles. Un autre exemple d'AMR est celui qui transporte les médicaments ou les fournitures dans un hôpital. Cet AMR permet d'automatiser la distribution de médicaments en prenant des affectations, en ramassant les médicaments et en les livrant aux bons patients dans l'hôpital.
Les robots mobiles autonomes (AMR) utilisent des caméras, des capteurs, l'intelligence artificielle et la vision par ordinateur pour naviguer indépendamment dans des environnements non contrôlés et accomplir diverses tâches. Les véhicules guidés autonomes (AGV), sont souvent supervisés par un opérateur humain et suivent un parcours ou un itinéraire prédéfini pour effectuer des tâches automatisées et répétitives. Les véhicules sous-marins télécommandés (ROV) sont déployés pour effectuer des tâches en eaux profondes tout en étant reliés et opérés par un équipage situé sur une plateforme ou à terre. Les ROV peuvent être dotés d'équipements tels qu'un bras robotique, une caméra, des lumières, ou des capteurs pour améliorer leurs capacités.